I am looking for: Learn arrow down
I am looking for:
Categories
Categories
GMAW Modes of Transfer
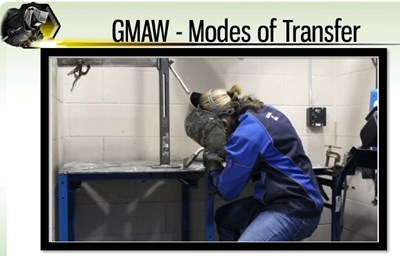
The learner will identify the advantages and disadvantages of the four modes of GMAW transfer.
Incremental Encoder Quadrature Modes
Learners study the method of using more than one track and quadrature modes to improve the resolution of an optical encoder. A brief quiz completes the activity.
Axis Modes
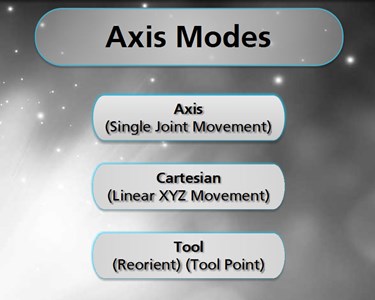
The learner will gain an understanding of the modes of axis movement for successful robot programming.
By cebery
Left- and Right-Brain Thinking Modes (Screencast)
In this interactive object, learners examine the characteristics of left- and right-brain thinkers.
By Leanne Healy
PID Control (Screencast)
Learners examine an animated motion-controlled robotic arm and observe the operation of a PID (Proportional-Integral-Derivative) control that makes movements quickly without overshooting or having a steady-state error. This activity has audio content.
The JK Flip-Flop

In this animated activity, learners view the input and output leads of a JK flip-flop. They also see how it functions in each mode of operation. A brief quiz completes the learning object.
Parasite Matching Exercises

Learners match the names of parasitic organisms to the diseases they cause and the modes of transmission.